امروز 19 اردیبهشت 1403
مدلسازی و شبیه سازی ربات 6 درجه آزادی ARMTIN10

9

مدلسازی و شبیه سازی ربات 6 درجه آزادی ARMTIN10
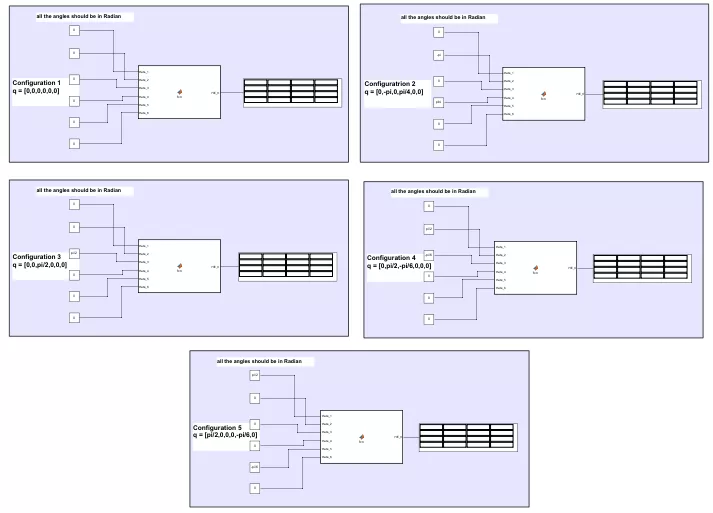
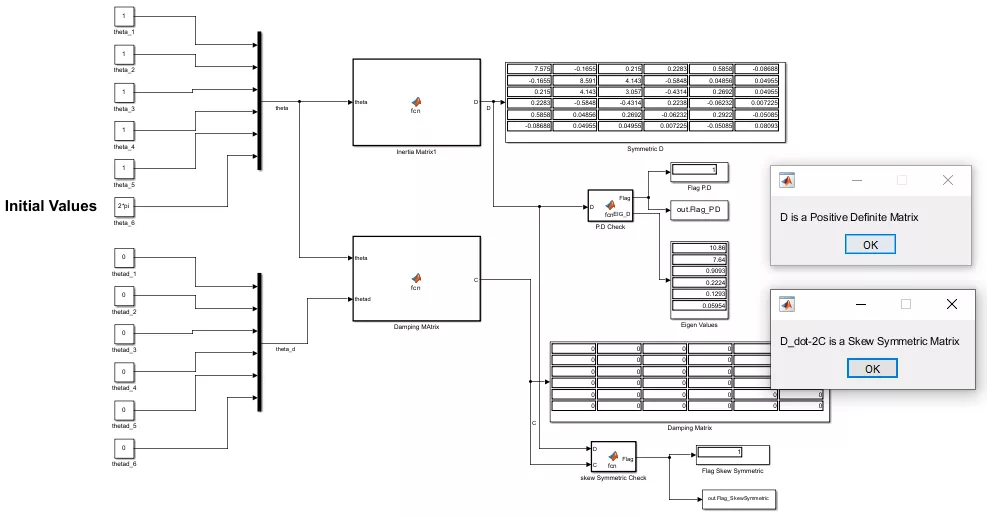
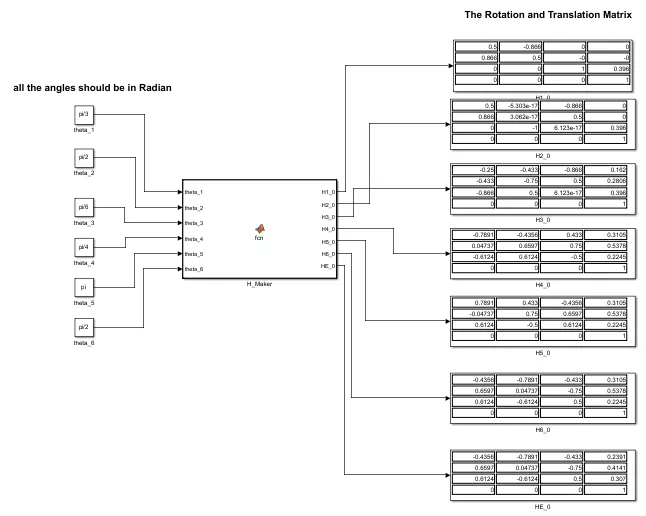
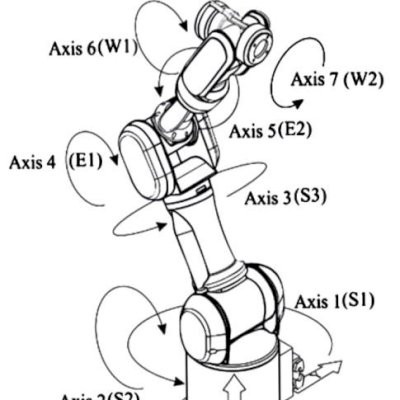
در این پروژه یک ربات 6 درجه آزادی در محیط سیمولینک مدلسازی و شبیه سازی شد. قسمت های مختلف این پروژه عبارت بودند از: Selecting The frames on robot Extracting DH Parameters Forward Kinematics Jacobian Matrix Calculating Dynamics
28 فروردین 1402
28 فروردین 1402

پروژهها
